SYSTEM DESCRIPTION 1. BRIEF DESCRIPTION (a) The Controller Area Network (CAN) is a serial data communication system for real time application. It is a vehicle multiplex communication system which has a high communication speed and the ability to detect malfunctions. 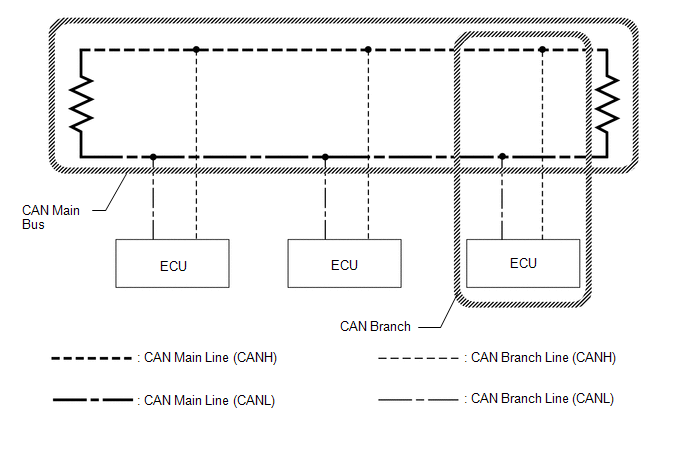 (b) Using the CANH and CANL bus lines as a pair, CAN communication is performed using a voltage differential. (A base voltage is applied to the pair of lines and a voltage differential is created when communicating.) (c) Many ECUs or sensors installed to the vehicle operate by sharing information and communicating with each other. (d) 2 resistors which are necessary for communication are used in a CAN bus main line. 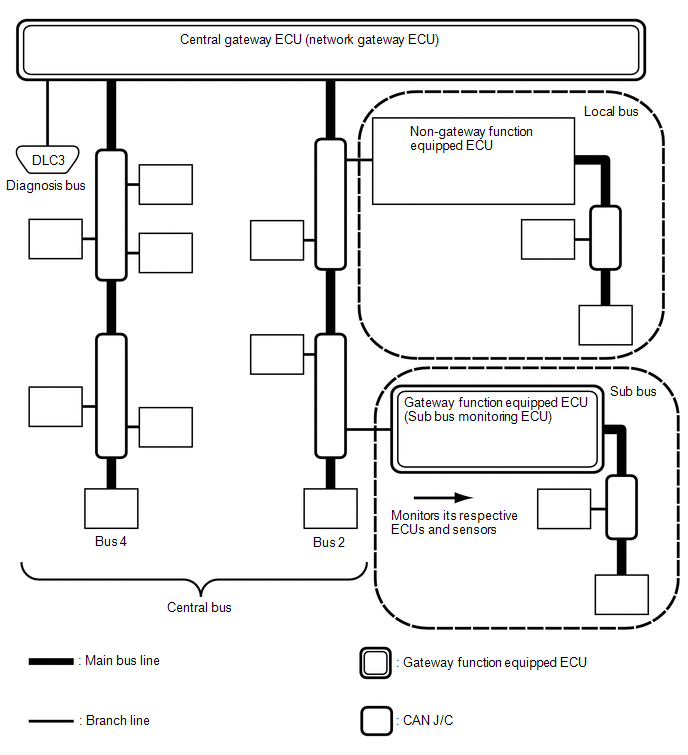 2. DEFINITION OF TERMS (a) Central bus (1) The central bus is a generic name for multiple subordinate CAN bus lines on the central gateway ECU (network gateway ECU). HINT: A bus is displayed as Bus on the "Communication Bus Check" screen of the Techstream. (b) Sub bus (1) A sub bus is a bus that has a gateway function equipped ECU in order to communicate with the central bus and other sub buses. HINT:
(c) Local bus (1) A local bus is a bus that does not have the ability to communicate with other buses. ECUs and sensors on a local bus can only communicate with other ECUs and sensors on the same bus. NOTICE: Gateway function not equipped ECU is a generic name for ECUs not connected to the central gateway ECU (network gateway ECU) with a gateway function. (d) CAN J/C (1) A CAN junction connector is a connector that connects branch lines to a main bus. (e) Main bus (1) A main bus line is the wire harness that runs between the 2 terminating resistors of a bus. (f) Branch (1) A branch line is a wire harness that connects an ECU or sensor to a main bus line. (g) Terminating resistors (1) Terminating resistors which maintain a stable signal inside the CAN bus are installed. 2 resistors of 120 Ω each located at each end of the bus are necessary.
|
Toyota Tundra Service Manual > Cylinder Block: Reassembly
REASSEMBLY CAUTION / NOTICE / HINT HINT: Perform "Inspection After Repairs" after replacing the piston or piston ring (See page ). PROCEDURE 1. INSTALL STUD BOLT (a) Using an E8 "TORX" socket wrench, install the stud bolts. Torque: for stud bolt A : 20 N·m {204 kgf·cm, 15 ft·lbf} for stud bolt B ...


